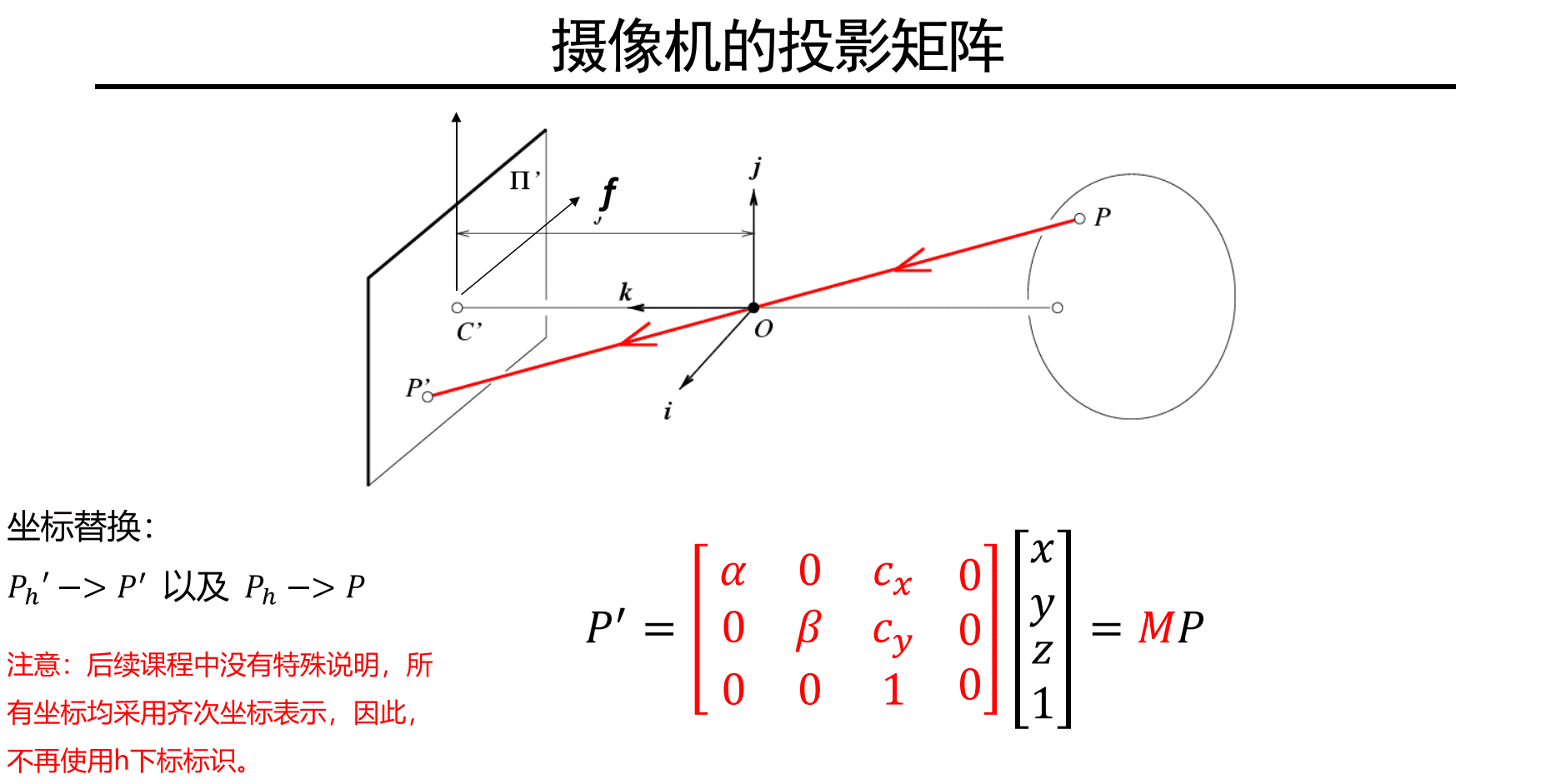
单目相机模型
小孔成像模型
齐次坐标表示: 将三维点用四维向量表示,可以用来表示无穷远点等
如:,
其中,
从影消点到内参矩阵
对于一个直线l,方向为d,无穷远点
无穷远点映射到影消点,因而影消点
K为相机内参矩阵
因此可以通过图片中影消点的坐标求出出相机的内参矩阵K
案例: LSS中lift为何能实现距离估计?
基于小孔成像模型, 图像中坐标与三维坐标的关系为:
可以通过先验的和坐标,求出坐标,即实现了距离估计
这种先验信息可以通过深度学习获得,因而LSS中的lift实现了距离估计
双目三维重建基础
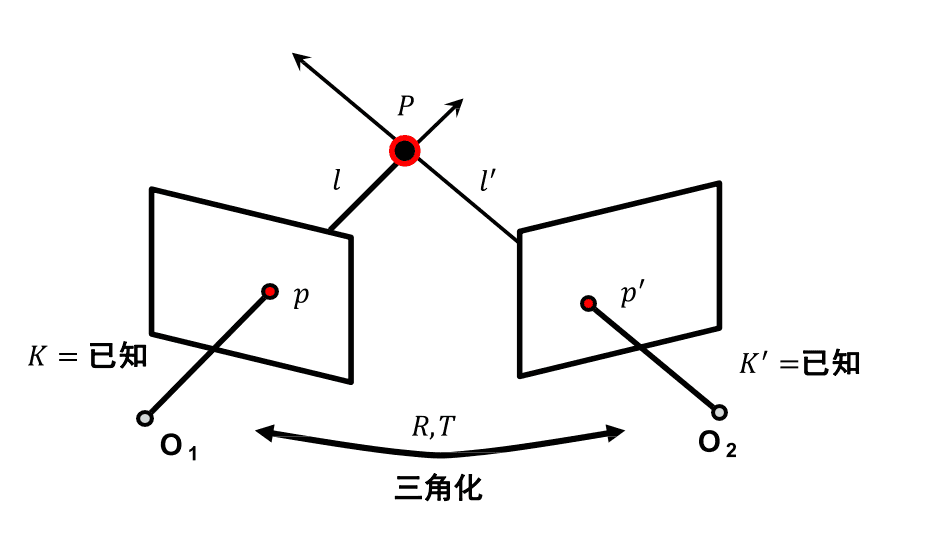
根据图,可以得到公式
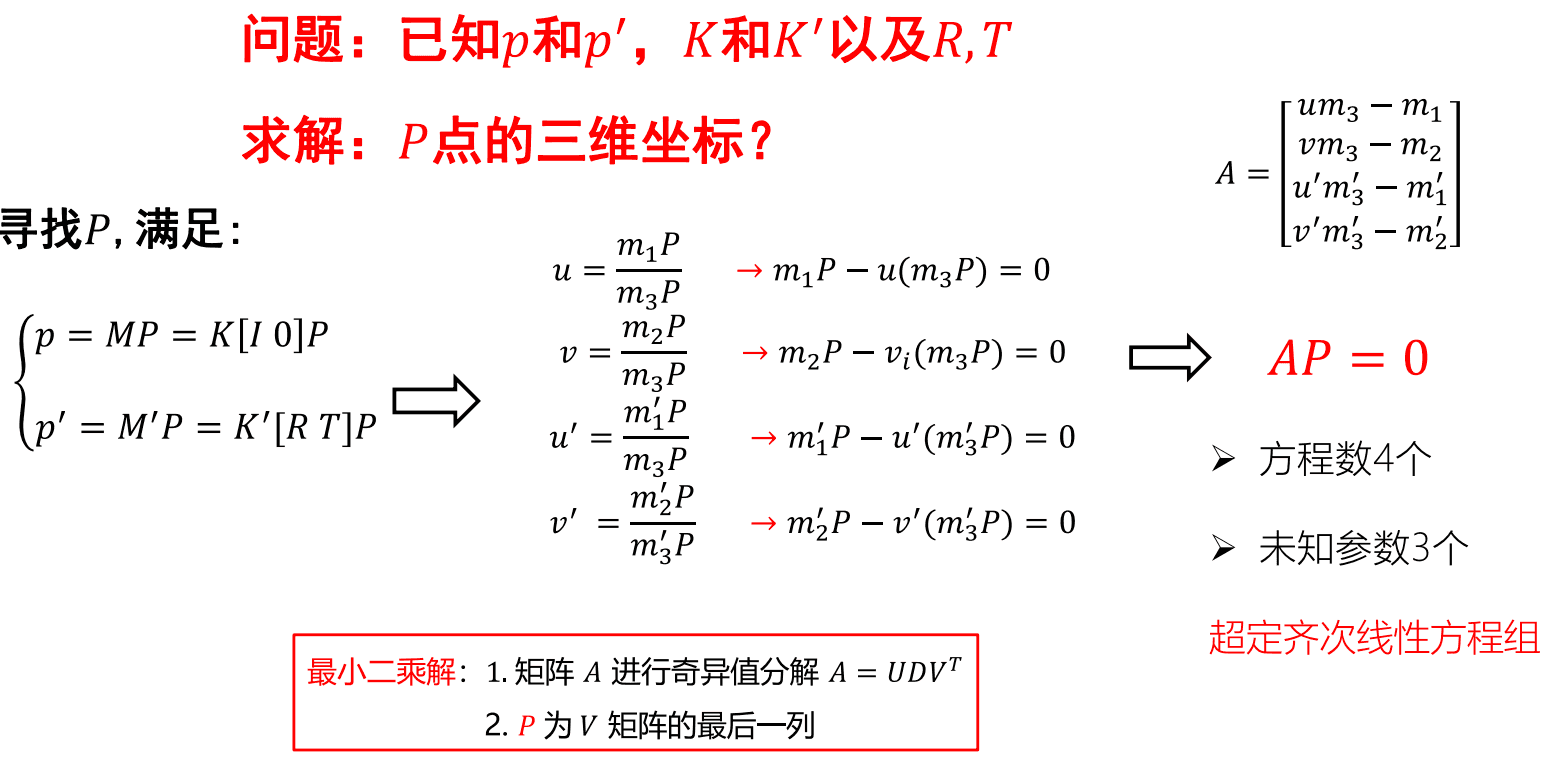
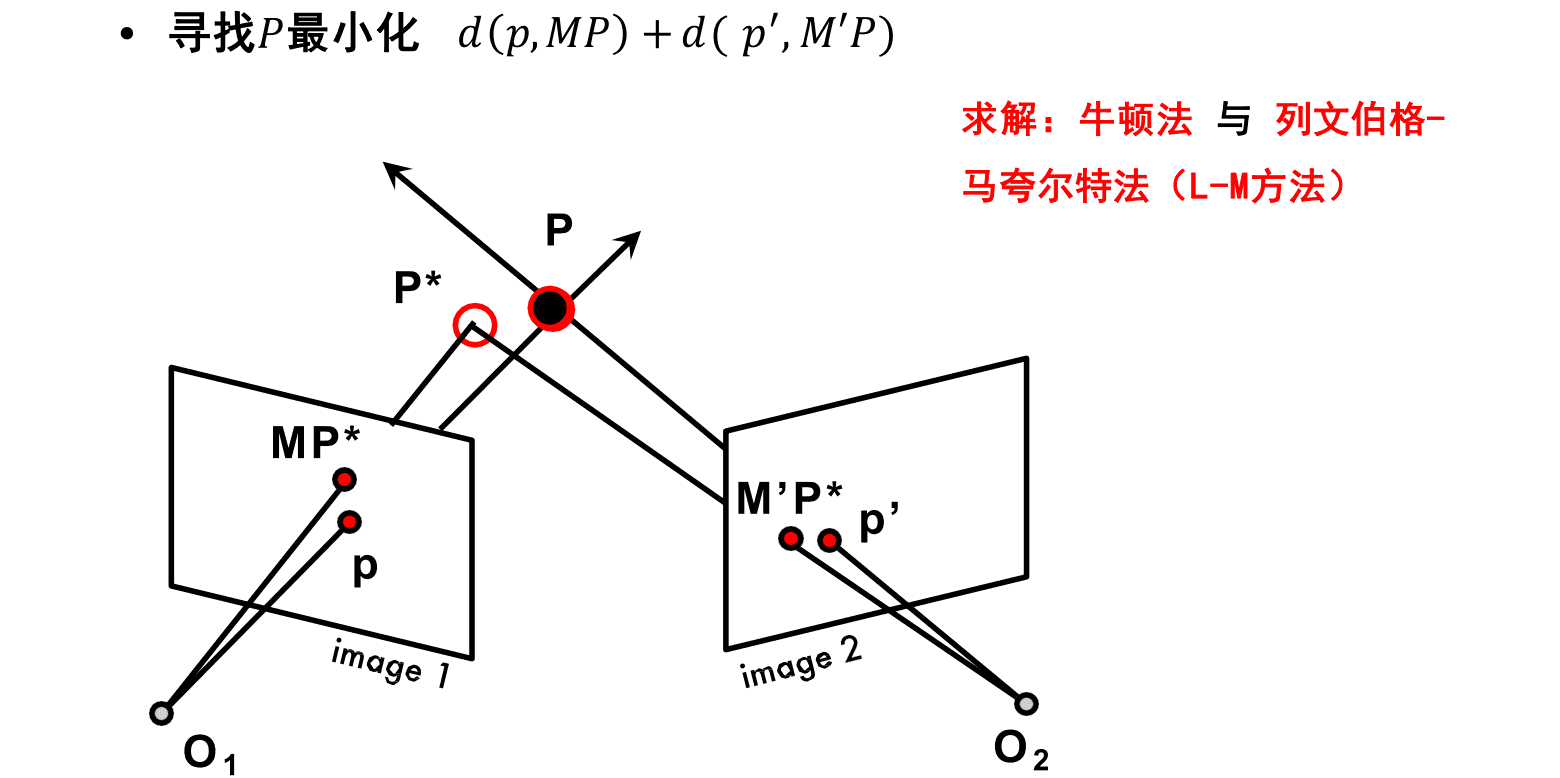
但是由于实际应用中有一定噪声存在,可能两条线不相交,此时应使用非线性解法
极几何
如何寻找对应点:
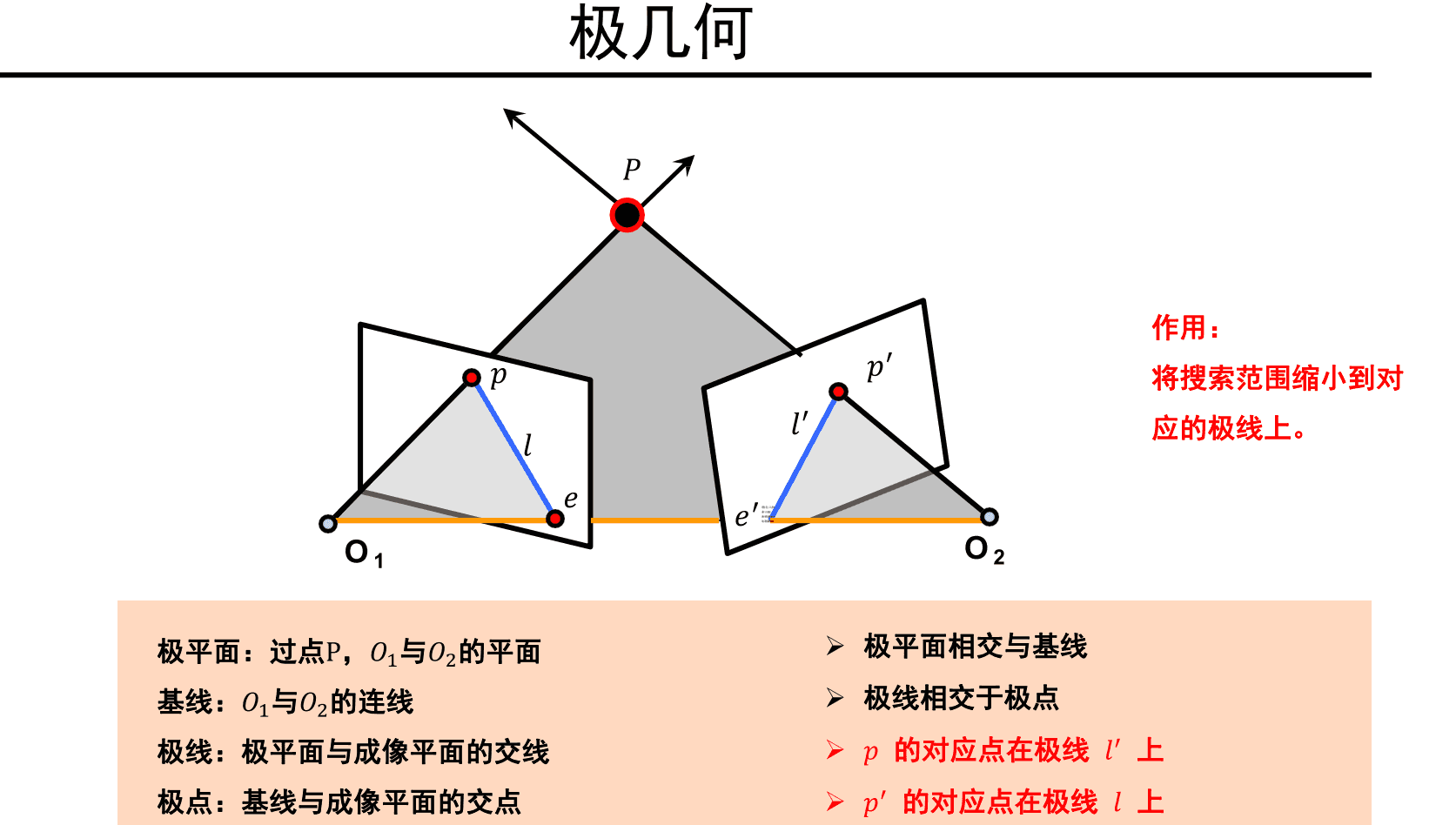
基于极几何,可知对应点可以在对应极线上搜索,只需知道, 和点即可得到点的线
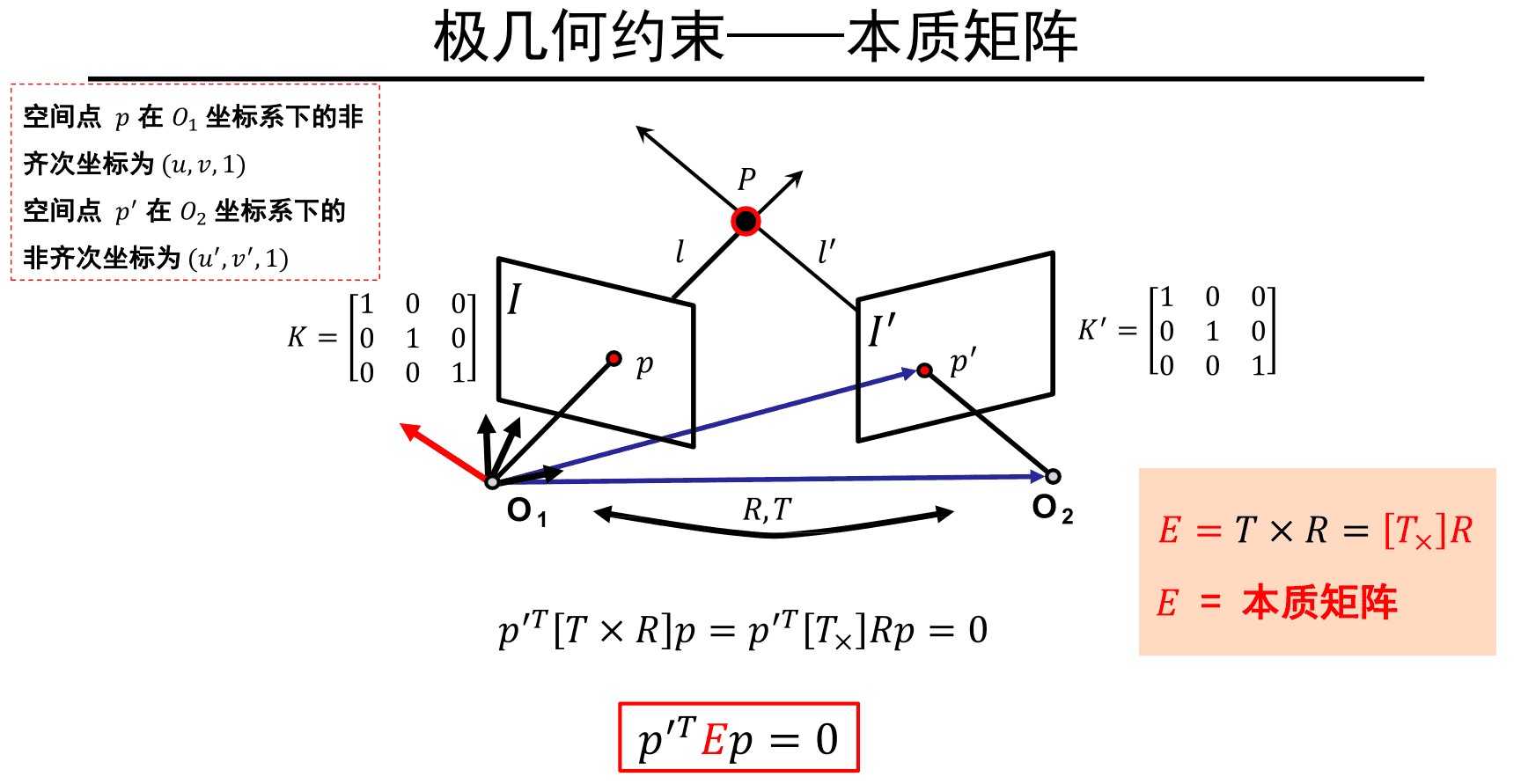
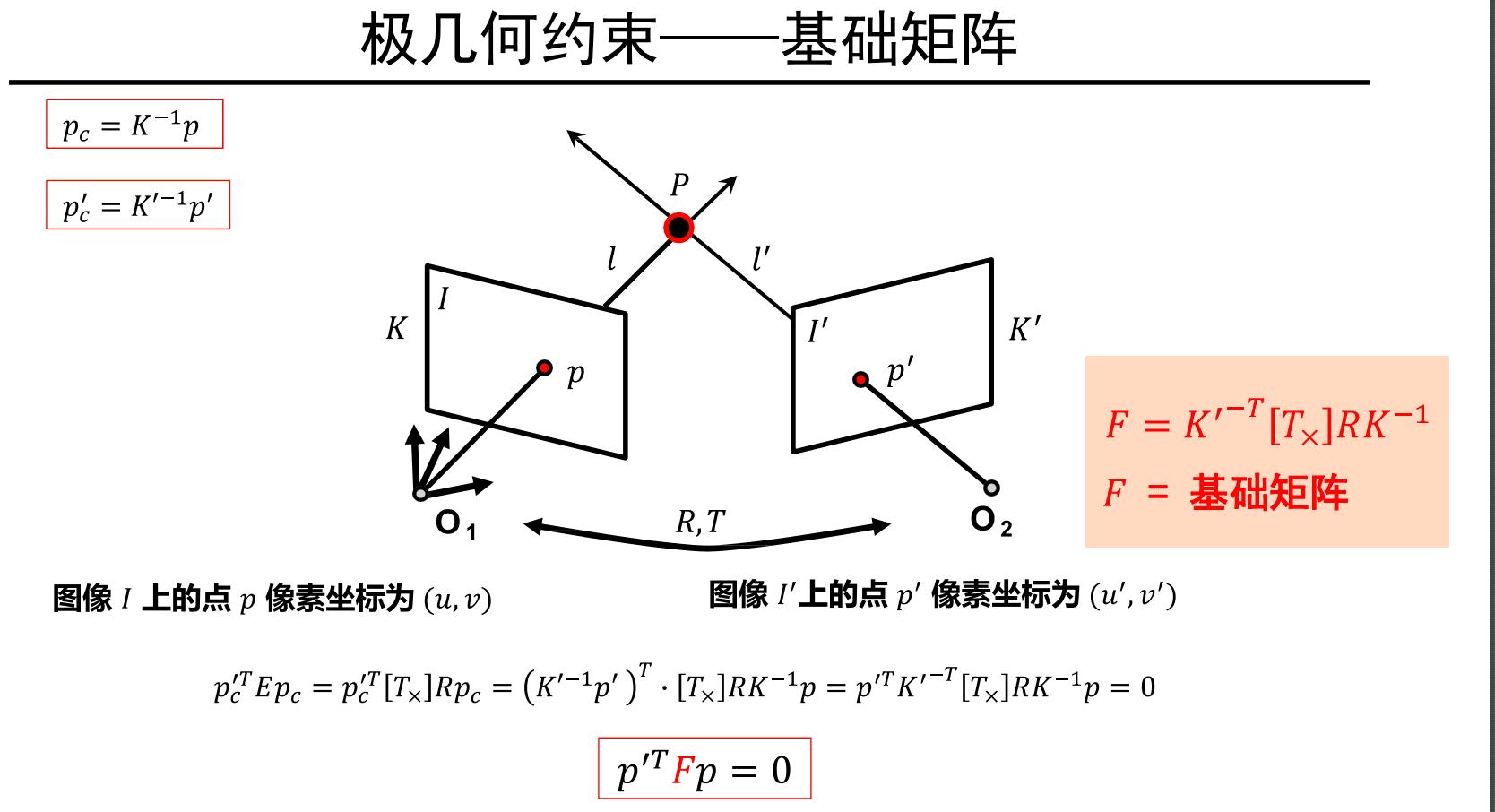
本质矩阵F自由度为7,如果知道F,无需场景信息以及摄像机内、外参数,即可建立左右图像对应关系()
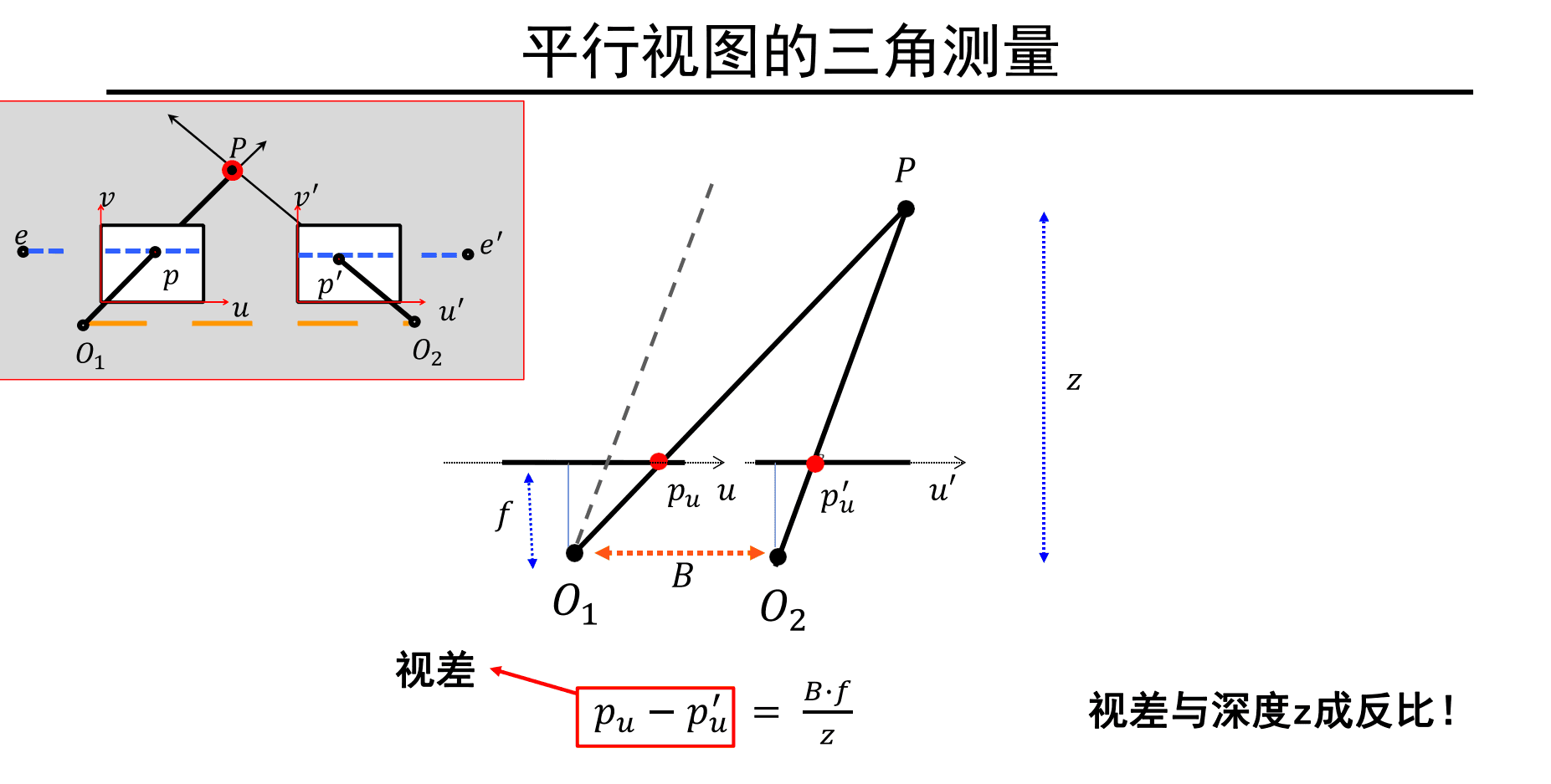
基于三角测量,可以得到三维点的坐标
案例: ok-robot中的三维语义识别重建
遍历所有图片,将对应物体的coordinate记录到semantic memory里面,以便后续导航
代码示意(非完整代码)
def _setup_owl_dense_labels(
self, dataset, mask_predictor
):
for idx, data_dict in tqdm.tqdm(
enumerate(dataloader), total=len(dataset), desc="Calculating OWL features"
):
rgb = einops.rearrange(data_dict["rgb"][..., :3], "b h w c -> b c h w")
xyz = data_dict["xyz_position"]
for image, coordinates in zip(rgb, xyz):
masks, iou_predictions, low_res_masks = mask_predictor.predict_torch(
point_coords=None,
point_labels=None,
boxes=transformed_boxes,
multimask_output=False
)
#print(masks.shape)
masks = masks[:, 0, :, :]
for pred_class, pred_box, pred_score, feature, pred_mask in zip(
labels.cpu(),
boxes.cpu(),
scores.cpu(),
features.cpu(),
masks.cpu(),
):
img_h, img_w = target_sizes.unbind(1)
real_mask = pred_mask[valid_mask]
real_mask_rect = valid_mask & pred_mask
# Go over each instance and add it to the DB.
total_points = len(reshaped_coordinates[real_mask])
resampled_indices = torch.rand(total_points) < self._subsample_prob
self._label_xyz.append(
reshaped_coordinates[real_mask][resampled_indices]
)
self._label_rgb.append(
reshaped_rgb[real_mask_rect][resampled_indices]
)
self._label_weight.append(
torch.ones(total_points)[resampled_indices] * pred_score
)
self._image_features.append(
einops.repeat(feature, "d -> b d", b=total_points)[
resampled_indices
]
)
label_idx += 1sfM流程
- 描述子: 是一种用于描述图像特征的向量,可以用于特征匹配
- 常用描述子: SIFT, SURF, ORB等
流程:
- 特征提取: 提取图像中的特征点
- 特征匹配: 通过描述子匹配,找到两幅图像中的对应点
- 求解本质矩阵: 通过对应点,求解本质矩阵
- 三角测量: 通过本质矩阵,求解三维点坐标
orb-slam
使用orb描述子
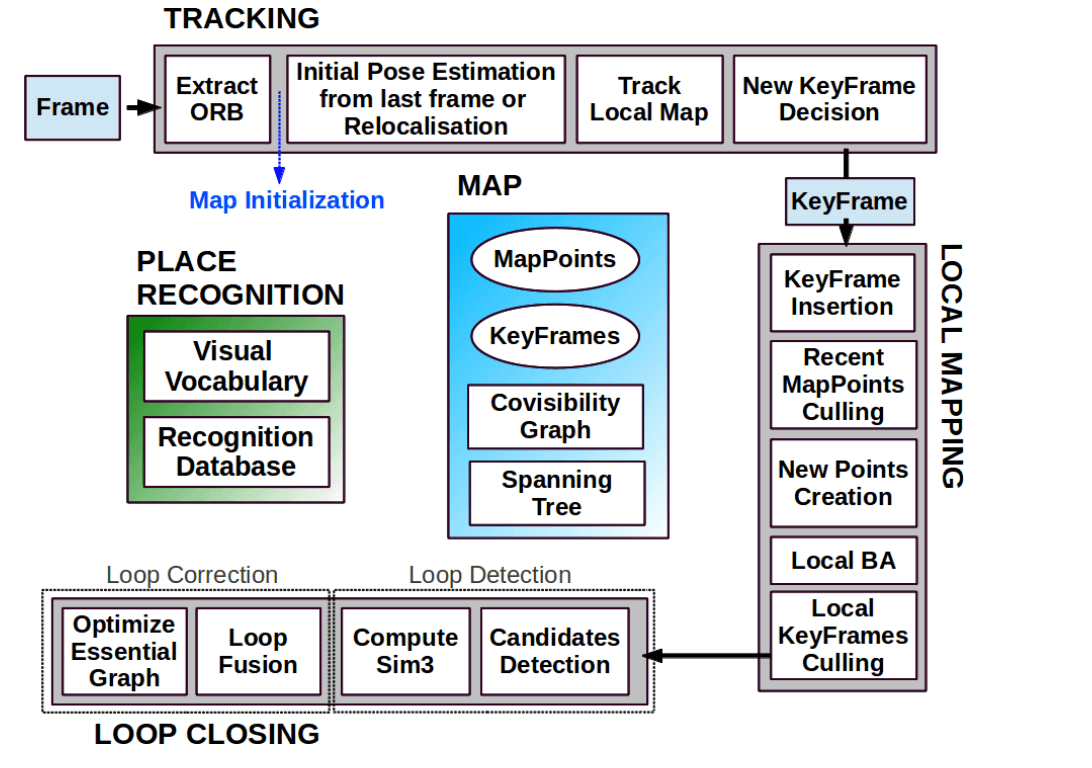
闭环检测: 判断是否是同一张图(通过描述子匹配,orb-slam中使用了词袋模型)
3DGS(3d gaussian splatting)流程
- 3d gaussian: 三维高斯球
- Splatting: 将3d投影到图像平面
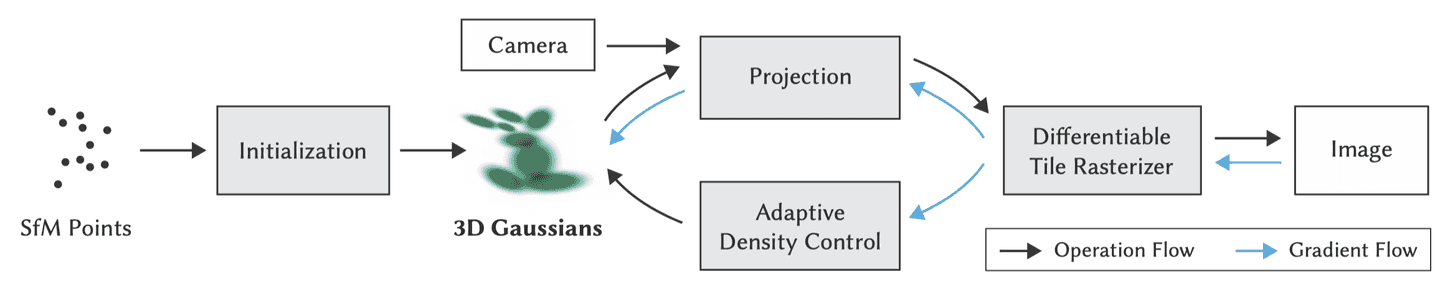
- 通过sfM获得初始3d点
- 将三维投影到2d image与原image做loss,通过优化得到更好的3d点
- 点密集化+点剪枝(Adaptive Density Control过程)