本文对应源码:仓库地址
摄像头采集
在windows中使用ffmpeg发送给wsl2,通过下面命令:
ffmpeg -f dshow -i video="1080P USB Camera" -preset ultrafast -tune zerolatency -vcodec libx264 -f mpegts udp:<ip>:<port>在wsl2中使用opencv接收,并显示:
import cv2
cap = cv2.VideoCapture('udp://<ip>:<port>')
while(cap.isOpened):
ret, frame = cap.read()
if ret:
// do somethingyolo v7得到关节数据并估计关节角
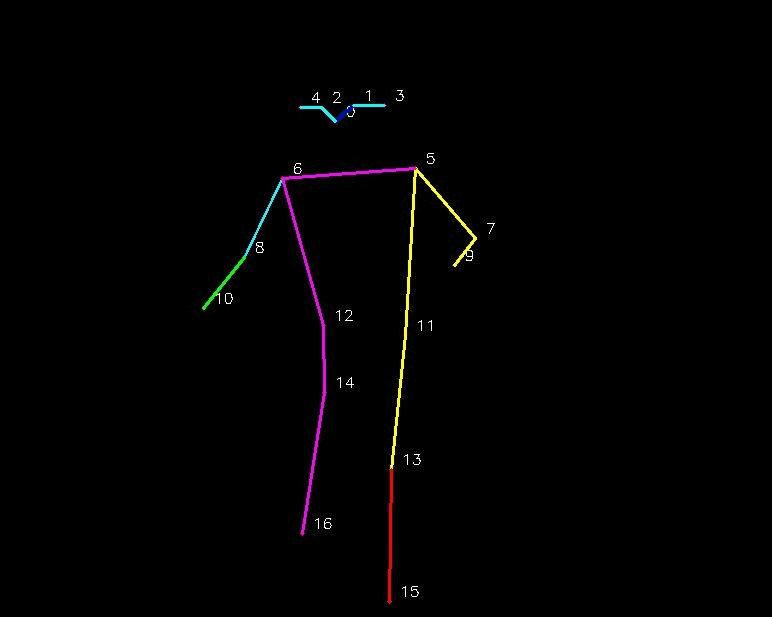
yolo v7进行pose-estimation的仓库:地址
找到keypoint landmark order,据此可得我们所需的左胳膊需要(5,7,9)三个关节点来计算关节角
def angle_between_points( p0, p1, p2 ):
a = (p1[0]-p0[0])**2 + (p1[1]-p0[1])**2
b = (p1[0]-p2[0])**2 + (p1[1]-p2[1])**2
c = (p2[0]-p0[0])**2 + (p2[1]-p0[1])**2
if a * b == 0:
return -1.0
return math.acos( (a+b-c) / math.sqrt(4*a*b) )
def get_angle_point(human, pos, steps=3):
pnts = []
if pos == 'left_elbow':
pos_list = (5,7,9)
for i in range(3):
pnts.append((int( human[ pos_list[i]*steps]), int( human[ pos_list[i]*steps+1])))
return pnts
def angle_left_elbow(human):
pnts = get_angle_point(human, 'left_elbow')
if len(pnts) != 3:
print('component incomplete')
return
angle = 0
if pnts is not None:
angle = angle_between_points(pnts[0], pnts[1], pnts[2])
print('left elbow angle:%f'%(angle))
send_angle_to_local(angle)
return angle
ros2节点操控宇树h1机器人
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
import threading
from sensor_msgs.msg import JointState
from math import pi
import socket
class RotateWheelNode(Node):
def __init__(self, name):
super().__init__(name)
self.get_logger().info(f"node {name} init..")
self.pub_joint_state_ = self.create_publisher(JointState, "/joint_states", 10)
self._init_joint_states()
self.pub_rate = self.create_rate(10)
self.thread_ = threading.Thread(target=self._thread_pub)
self.thread_.start()
def _init_joint_states(self):
self.joint_states_ = JointState()
self.joint_states_.name = [
"left_hip_yaw_joint",
"left_hip_roll_joint",
"left_hip_pitch_joint",
"left_knee_joint",
"left_ankle_joint",
"right_hip_yaw_joint",
"right_hip_roll_joint",
"right_hip_pitch_joint",
"right_knee_joint",
"right_ankle_joint",
"torso_joint",
"left_shoulder_pitch_joint",
"left_shoulder_roll_joint",
"left_shoulder_yaw_joint",
"left_elbow_joint",
"left_hand_joint",
"L_thumb_proximal_yaw_joint",
"L_thumb_proximal_pitch_joint",
"L_thumb_intermediate_joint",
"L_thumb_distal_joint",
"L_index_proximal_joint",
"L_index_intermediate_joint",
"L_middle_proximal_joint",
"L_middle_intermediate_joint",
"L_ring_proximal_joint",
"L_ring_intermediate_joint",
"L_pinky_proximal_joint",
"L_pinky_intermediate_joint",
"right_shoulder_pitch_joint",
"right_shoulder_roll_joint",
"right_shoulder_yaw_joint",
"right_elbow_joint",
"right_hand_joint",
"R_thumb_proximal_yaw_joint",
"R_thumb_proximal_pitch_joint",
"R_thumb_intermediate_joint",
"R_thumb_distal_joint",
"R_index_proximal_joint",
"R_index_intermediate_joint",
"R_middle_proximal_joint",
"R_middle_intermediate_joint",
"R_ring_proximal_joint",
"R_ring_intermediate_joint",
"R_pinky_proximal_joint",
"R_pinky_intermediate_joint",
]
self.joint_states_.position = [0.0] * len(self.joint_states_.name)
self.joint_states_.header.stamp = self.get_clock().now().to_msg()
self.joint_states_.header.frame_id = ""
self.joint_states_.velocity = []
self.joint_states_.effort = []
def get_angle(self):
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
server_address = ("localhost", 12345)
sock.bind(server_address)
data, address = sock.recvfrom(4096)
angle = float(data.decode())
self.get_logger().info(
f"received {data.decode()} from {address}, angle: {angle}"
)
return angle
def _thread_pub(self):
while rclpy.ok():
index = self.joint_states_.name.index("left_elbow_joint")
self.joint_states_.position[index] = self.get_angle() - pi / 2
# self.joint_states_.position[0] += pi
self.joint_states_.header.stamp = self.get_clock().now().to_msg()
self.pub_joint_state_.publish(self.joint_states_)
self.get_logger().info(f"publishing {self.joint_states_.position[index]}")
self.pub_rate.sleep()
def main(args=None):
rclpy.init(args=args)
node = RotateWheelNode("move_h1_joints")
rclpy.spin(node)
rclpy.shutdown()注意,由于h1机器人的肘部关节角是相对于水平方向的,所以需要减去pi/2
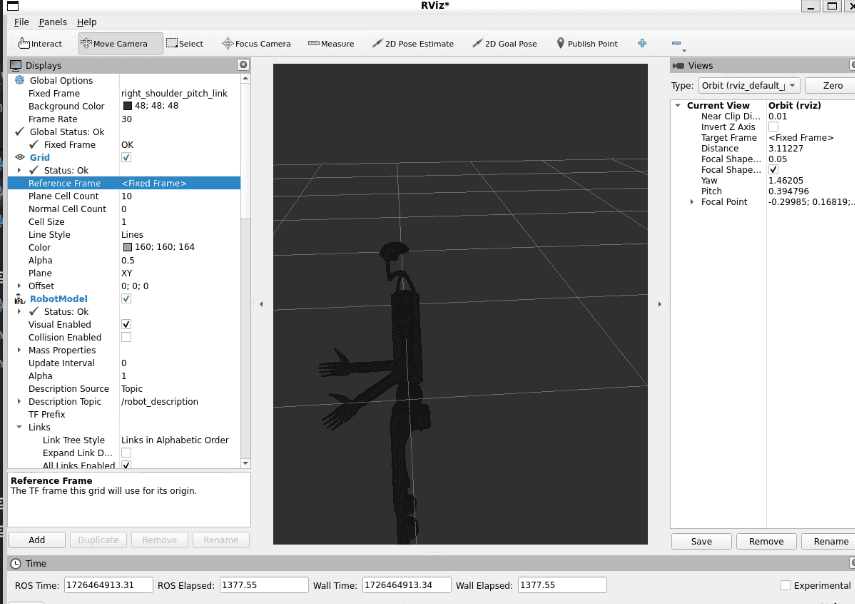
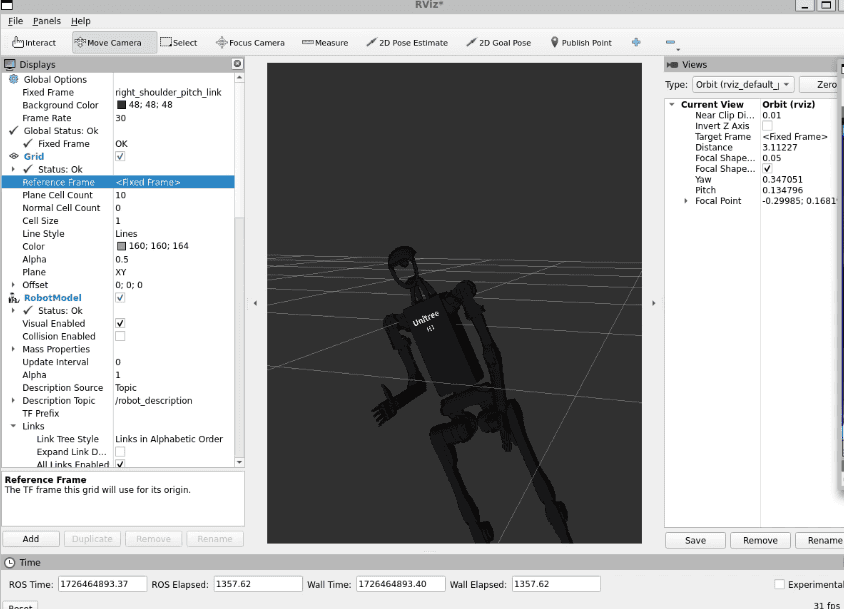
rviz2仿真结果

反思
摄像头其实并不适合用来做关节角的估计,因为摄像头的数据是二维的,而关节角是三维的,所以在多数情况下, 关节角的估计是不准确的,所以在实际应用中,还是应该使用传感器如IMU来获取关节角